 / Preparation Physics System of Particles and Rotational Motion
/ Preparation Physics System of Particles and Rotational Motion
When discussing the difficulty of moving an object, we typically consider its mass. The moment of inertia, however, is an additional consideration when it comes to rotating or spinning things. It indicates the degree to which an object resists being rotated. The location of the mass is equally as important as the object's weight. It requires more work to spin if the majority of the weight is located far from the center. It is far more difficult to rotate a long stick with weights on both ends than it is to rotate the identical staff with the weights close to the middle. Thus, the rotating equivalent of mass is the moment of inertia.
- What is Moment of Inertia?
- Types of Moment of Inertia
- Theorems of Moment of Inertia
- Radius of Gyration
What is Moment of Inertia?
MOMENT OF INERTIA
Like the centre of mass, the moment of inertia is a property of an object that is related to its mass distribution. The moment of inertia (denoted by I) is an important quantity in the study of system of particles that are rotating. The role of the moment of inertia in the study of rotational motion is analogous to that of mass in the study of linear motion.
Moment of inertia gives a measurement of the resistance of a body to a change in its rotational motion. If a body is at rest, the larger the moment of inertia of a body the more difficuilt it is to put that body into rotational motion. Similarly, the larger the moment of inertia of a body, the more difficult to stop its rotational motion. The moment of inertia is calculated about some axis (usually the rotational axis).
Moment of inertia depends on :
(i) Density of the material of body
(ii) Shape & size of body
(iii) Axis of rotation
In totality we can say that it depends upon distribution of mass relative to axis of rotation.
Note:
Moment of inertia does not change if the mass:
(i) is shifted parallel to the axis of the rotation
(ii) is rotated with constant radius about axis of rotation
Types of Moment of Inertia
1. Moment of Inertia of a Single Particle
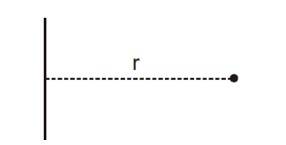
For a very simple case the moment of inertia of a single particle about an axis is given by, I = mr2 ..........(i)
Here, m is the mass of the particle and r its distance from the axis under consideration.
2. Moment of Inertia of a System of Particles
The moment of inertia of a system of particles about an axis is given by,
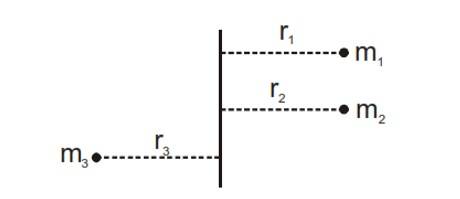
where is the perpendicular distance from the axis to the th particle, which has a mass .
3. Moment of Inertia of Rigid Bodies
For a continuous mass distribution such as found in a rigid body, we replace the summation of by an integral. If the system is divided into infinitesimal element of mass and if is the distance from a mass element to the axis of rotation, the moment of inertia is, where the integral is taken over the system.
(A) Uniform rod about a perpendicular bisector
Consider a uniform rod of mass and length figure and suppose the moment of inertia is to be calculated about the bisector AB. Take the origin at the middle point of the rod. Consider the element of the rod between a distance and from the origin. As the rod is uniform, Mass per unit length of the rod so that the mass of the element . The perpendicular distance of the element from the line is . The moment of inertia of this element about is
When
, the element is at the left end of the rod. As
is changed from
to
, the elements cover the whole rod.
Thus, the moment of inertia of the entire rod about
is
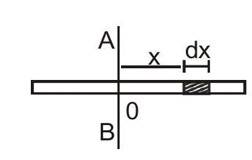
(B) Moment of inertia of a rectangular plate about a line parallel to an edge and passing through the centre
The situation is shown in figure. Draw a line parallel to at a distance from it and another at a distance . We can take the strip enclosed between the two lines as the small element.
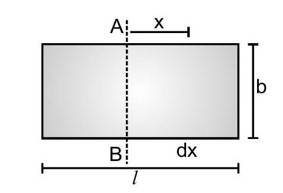
It is "small" because the perpendiculars from different points of the strip to AB differ by not more than dx . As the plate is uniform, its mass per unit area
Mass of the strip
.
The perpendicular distance of the strip from
.
The moment of inertia of the strip about
. The moment of inertia of the given plate is, therefore,
The moment of inertia of the plate about the line parallel to the other edge and passing through the centre may be obtained from the above formula by replacing by b and thus,
(C) Moment of inertia of a circular ring about its axis (the line perpendicular to the plane of the ring through its centre)
Suppose the radius of the ring is R and its mass is M . As all the elements of the ring are at the same perpendicular distance from the axis, the moment of inertia of the ring is
(D) Moment of inertia of a uniform circular plate about its axis
Let the mass of the plate be and its radius . The centre is at and the axis is perpendicular to the plane of the plate.
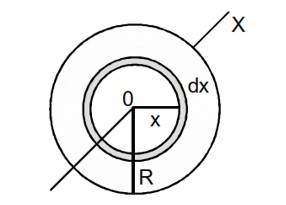
Draw two concentric circles of radii
and
, both centred at
and consider the area of the plate in between the two circles.
This part of the plate may be considered to be a circular ring of radius
. As the periphery of the ring is
and its width is
, the area of this elementary ring is
. The area of the plate is
. As the plate is uniform,
Its mass per unit area
Mass of the ring
Using the result obtained above for a circular ring, the moment of inertia of the elementary ring about OX is
The moment of inertia of the plate about OX is
(E) Moment of inertia of a hollow cylinder about its axis
Suppose the radius of the cylinder is and its mass is . As every element of this cylinder is at the same perpendicular distance from the axis, the moment of inertia of the hollow cylinder about its axis is
(F) Moment of inertia of a uniform solid cylinder about its axis
Let the mass of the cylinder be
and its radius
. Draw two cylindrical surface of radii
and
coaxial with the given cylinder. Consider the part of the cylinder in between the two surface. This part of the cylinder may be considered to be a hollow cylinder of radius
. The area of cross-section of the wall of this hollow cylinder is
. If the length of the cylinder is
, the volume of the material of this elementary hollow cylinder is
.
The volume of the solid cylinder is
and it is uniform, hence its mass per unit volume is
The mass of the hollow cylinder considered is
As its radius is , its moment of inertia about the given axis is
The moment of inertia of the solid cylinder is, therefore,
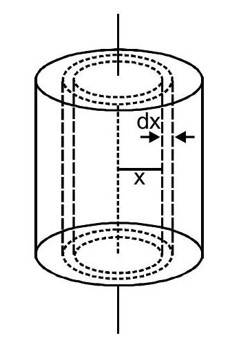
Note that the formula does not depend on the length of the cylinder.
(G) Moment of inertia of a uniform hollow sphere about a diameter
Let M and R be the mass and the radius of the sphere, O its centre and OX the given axis (figure). The mass is spread over the surface of the sphere and the inside is hollow.
Let us consider a radius OA of the sphere at an angle
with the axis OX and rotate this radius about OX. The point A traces a circle on the sphere. Now change
to
and get another circle of somewhat larger radius on the sphere. The part of the sphere between these two circles, shown in the figure, forms a ring of radius
. The width of this ring is
and its periphery is
. Hence, the area of the ring
.
Mass per unit area of the sphere
.
The mass of the ring
.
The moment of inertia of this elemental ring about OX is
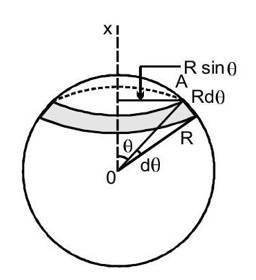
As increases from 0 to , the elemental rings cover the whole spherical surface. The moment of inertia of the hollow sphere is, therefore,
(H) Moment of inertia of a uniform solid sphere about a diameter
Let M and R be the mass and radius of the given solid sphere. Let O be centre and OX the given axis. Draw two spheres of radii
and
concentric with the given solid sphere. The thin spherical shell trapped between these spheres may be treated as a hollow sphere of radius
.
The mass per unit volume of the solid sphere

The thin hollow sphere considered above has a surface area and thickness . Its volume i and hence its mass is
Its moment of inertia about the diameter OX is, therefore,
If
, the shell is formed at the centre of the solid sphere. As
increases from 0 to
, the shells cover the whole solid sphere.
The moment of inertia of the solid sphere about OX is, therefore,
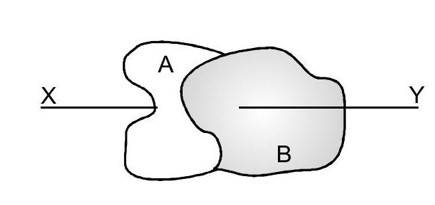
4. Moment of Inertia of Compound Bodies
Consider two bodies A and B, rigidly joined together. The moment of inertia of this compound body, about an axis XY, is required. If is the moment of inertia of body A about XY. is the moment of inertia of body B about XY. Then, moment of Inertia of compound body I = IA +IB Extending this argument to cover any number of bodies rigidly joined together, we see that the moment of inertia of the compound body, about a specified axis, is the sum of the moments of inertia of the separate parts of the body about the same axis.
Theorems of Moment of Inertia
There are two important theorems on moment of inertia, which, in some cases enable the moment of inertia of a body to be determined about an axis, if its moment of inertia about some other axis is known. Let us now discuss both of them.
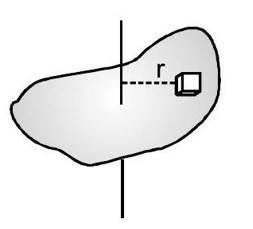
Theorem of parallel axes
A very useful theorem, called the parallel axes theorem relates the moment of inertia of a rigid body about two parallel axes, one of which passes
through the centre of mass.
Two such axes are shown in figure for a body of mass M. If r is the distance between the axes and
and I are the respective
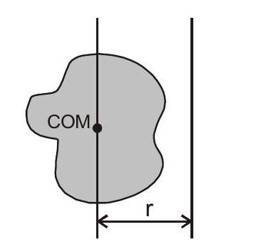
moments of inertia about them, these moments are related by,
- Theorem of parallel axis is applicable for any type of rigid body whether it is a two dimensional or three dimensional
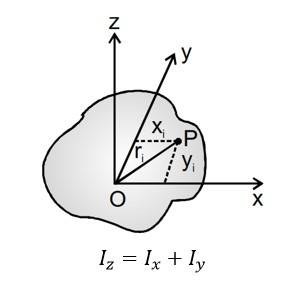
Theorem of perpendicular axes
The theorem states that the moment of inertia of a plane lamina about an axis perpendicular to the plane of the lamina is equal to the sum of the moments of inertia of the lamina about two axes perpendicular to each other, in its own plane and intersecting each other, at the point where the perpendicular axis passes through it.
Let x and y axes be chosen in the plane of the body and z-axis perpendicular, to this plane, three axes being mutually perpendicular, then the theorem states that.
Important point in perpendicular axis theorem
(i) This theorem is applicable only for the plane bodies (two dimensional).
(ii) In theorem of perpendicular axes, all the three axes (x,y and z ) intersect each other and this point may be any point on the plane of the body (it may even lie outside the body).
(iii) Intersection point may or may not be the centre of mass of the body.
Radius of Gyration
Radius of gyration is a way to figure out how far the mass of something "acts" from the center when it spins. Imagine you could take all the weight in a spinning object and move it so it’s all at the same distance from the axis—and it would still spin the same way. That distance? That’s what we call the radius of gyration. For example, think about a spinning wheel. If the weight is mostly near the edge, it feels harder to spin—that means a bigger radius of gyration. If everything’s packed close to the center, it’s easier to turn, and the radius is smaller.
where:
K is the radius of gyration
I is moment of inertia
and m is mass.
Physics System of Particles and Rotational Motion Exam
Student Forum
Other Topics under this Chapter
- Overview
- Moment of Inertia
- Centre of Mass
- Motion of Centre of Mass
- Vector Product of Two Vectors
- Torque and Angular Momentum
- Equilibrium of a Rigid Body
- Linear Momentum of a System of Particles
- Angular Velocity and Relation with Linear Velocity
- Kinematics of Rotational Motion About a Fixed Axis
- Dynamics of Rotational Motion About a Fixed Axis
- Angular Momentum of Rotation About a Fixed Axis
- Streamline Flow
Other Class 11th Physics Chapters
- Physics Mechanical Properties of Solids
- NCERT Class 11 Physics
- NCERT Class 11 Notes
- NCERT Notes
- Physics Motion in Plane
- Physics Mechanical Properties of Fluids
- Physics Motion in Straight Line
- Physics System of Particles and Rotational Motion
- Physics Oscillations
- Physics Waves
- Physics Thermal Properties of Matter
- Physics Motion
- Physics Gravitation
- Physics Thermodynamics
- Physics Work, Energy and Power
- Physics Units and Measurement
- Physics Laws of Motion